

Product Details
Tempat asal: Shenzhen, Cina
Nama merek: JIG
Nomor model: ZCT62/85130/200/280
Payment & Shipping Terms
Kuantitas min Order: 1 buah
Syarat-syarat pembayaran: L/C, D/A, D/P, T/T
Rasio pengurangan: |
5-10 |
Torsi keluaran terukur: |
4-130N. 4-130N. M M |
Torsi keluaran maksimum: |
3 Kali Nilai Torsi |
Akurasi Posisi: |
≤ 3anc-menit |
Beban aksial yang diijinkan: |
8000N |
Kehidupan yang presisi: |
30000 Jam (Operasi intermiten) |
Efisiensi transmisi: |
90-95% |
Kebisingan: |
≤ 67dB |
Metode Instalasi: |
setiap |
Rasio pengurangan: |
5-10 |
Torsi keluaran terukur: |
4-130N. 4-130N. M M |
Torsi keluaran maksimum: |
3 Kali Nilai Torsi |
Akurasi Posisi: |
≤ 3anc-menit |
Beban aksial yang diijinkan: |
8000N |
Kehidupan yang presisi: |
30000 Jam (Operasi intermiten) |
Efisiensi transmisi: |
90-95% |
Kebisingan: |
≤ 67dB |
Metode Instalasi: |
setiap |
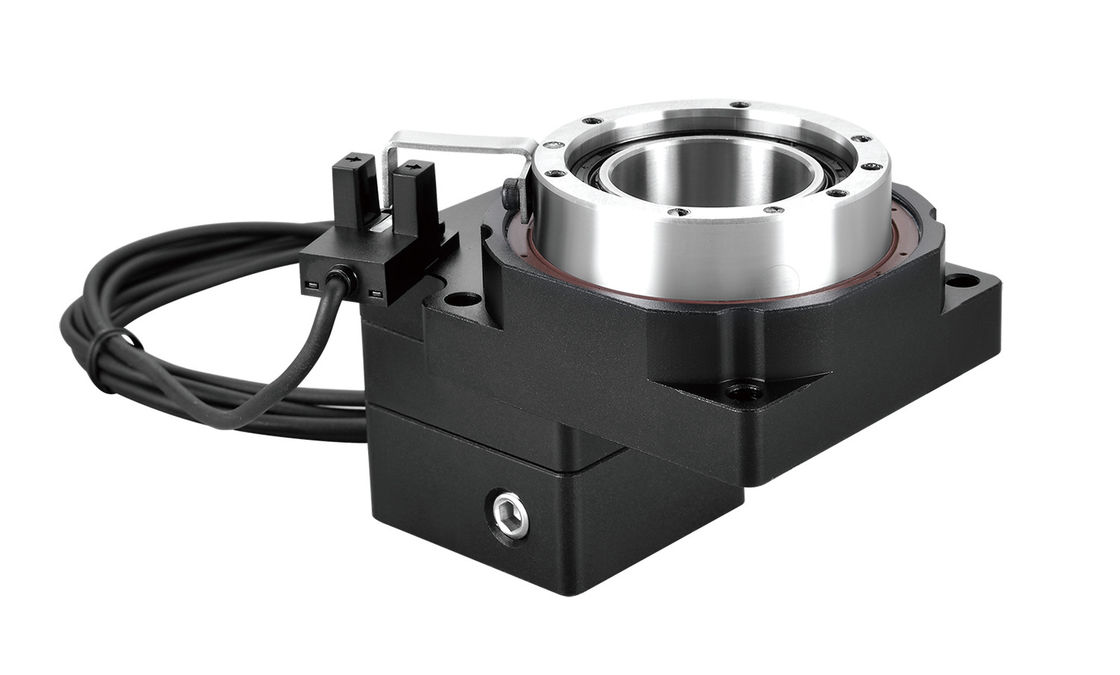
Fitur:
1Struktur berongga
2,Keakuratan posisi berulang tinggi
3,Kekuatan tinggi
4,Keakuratan putaran tinggi
5,Setiap konfigurasi motor
Platform berputar berongga langsung menggantikan cam splitter dan motor DD.Platform berputar berongga adalah platform berputar digital presisi tinggi dengan keuntungan biaya rendah dan akurasi tinggi, menempati pasar yang kuat di kategori platform berputar.
aplikasi
1. Meja kerja berputar dalam transformasi otomatisasi lini produksi
2. Rotating chucks dalam mesin penandaan laser atau ukiran
3. sumbu rotasi dalam mekanisme penyelarasan presisi
4. beban ringan robot lengan sendi
5. Penggerak langsung gear presisi tinggi
6Keakuratan tinggi, torsi tinggi, kekakuan tinggi, mudah digunakan, dikombinasikan dengan motor stepper loop tertutup kinerja tinggi
Keuntungan
1. Koneksi langsung: Struktur poros output cakram dapat terhubung langsung ke benda kerja beban cakram, menghemat desain, men-debug biaya tenaga kerja, dan koneksi bagian penghubung
Biaya pengadaan konektor.
2Platform berputar berkaliber besar: mencapai kabel dan pipa yang lebih sederhana.
3Transmisi gigi: mencapai posisi presisi tinggi.
4. Posisi waktu singkat: Ini dapat mencapai posisi beban inersia dalam waktu singkat.
Bentuk struktural umum
Koaksial
Poros motor dan poros tengah dari meja putar adalah konsentris dan membentuk platform putar langsung
Jenis paraxial
Sisi terhubung platform berputar dengan poros motor dan poros tengah dari meja putar dalam perilaku paralel
sudut kanan
Poros motor tegak lurus pada sumbu pusat dari meja putar dan membentuk sisi sumbu platform berputar
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

